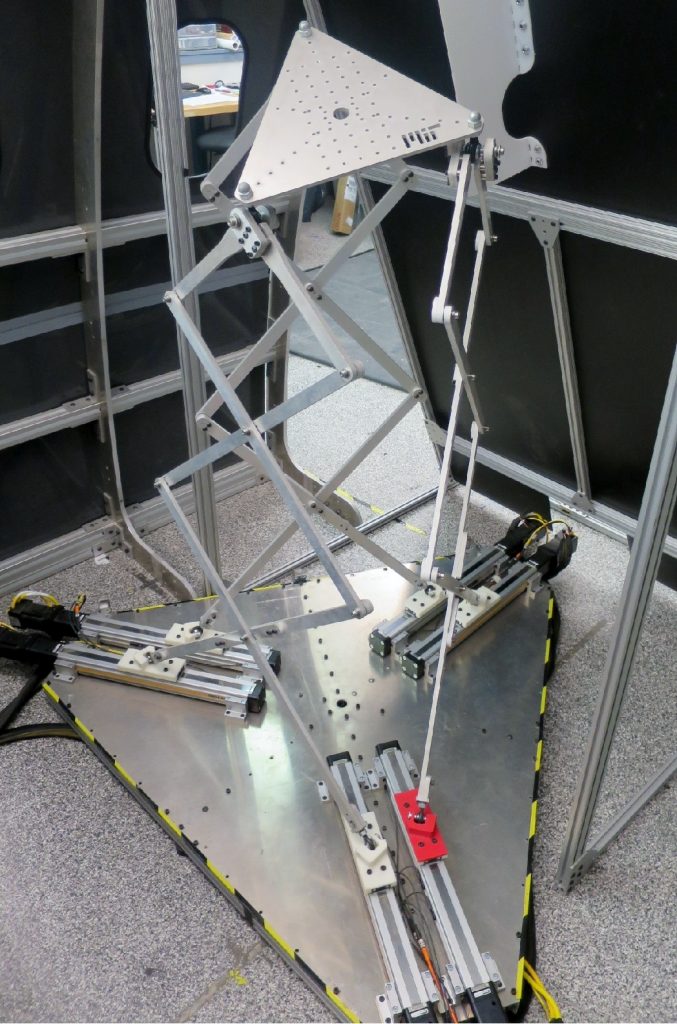
 In order to provide a lightweight and versatile robotic solution for quickly and accurately installing fasteners inside of commercial aircraft as they are being manufactured, we explored a 6 DOF robotic mechanism for reaching high ceilings and positioning an end-effector. The end-effector is supported with three scissor mechanisms that extend towards the ceiling with 6 independent linear actuators moving the base ends of the individual scissors. The top point of each scissor is connected to one of three ball joints located at the three vertices of the top triangular plate holding the end effector.
In order to provide a lightweight and versatile robotic solution for quickly and accurately installing fasteners inside of commercial aircraft as they are being manufactured, we explored a 6 DOF robotic mechanism for reaching high ceilings and positioning an end-effector. The end-effector is supported with three scissor mechanisms that extend towards the ceiling with 6 independent linear actuators moving the base ends of the individual scissors. The top point of each scissor is connected to one of three ball joints located at the three vertices of the top triangular plate holding the end effector.

When the TSE is fully contracted the whole structure becomes compact, making it easy for transportation. At full extension, the device height becomes many times greater than its original height (like a traditional 1-DOF aerial scissor lift commonly used for maintenance, assembly, and construction), allowing it to reach high ceilings and walls.
The use of scissor/pantograph mechanisms enables the TSE to achieve a larger height range than most other 6-DOF parallel robots that use traditional piston-like actuators.

Coordinated motion of the 6 linear actuators at the base allows the end-effector to reach an arbitrary position with an arbitrary orientation.
Publications:
- D. J. Gonzalez and H. H. Asada, “Design and Analysis of 6-DOF Triple Scissor Extender Robots with Applications in Aircraft Assembly,” in IEEE Robotics and Automation Letters (RA-L), vol. 2, no. 3, pp. 1420-1427, July 2017. The contents of this paper were also selected by ICRA’17 Program Committee for presentation at the Conference.
- D. J. Gonzalez and H. H. Asada, “Triple Scissor Extender: A 6-DOF Lifting and Positioning Robot“, 2016 IEEE International Conference on Robotics and Automation (ICRA 2016), Stockholm, Sweden, May 2016, pp. 847-853.
This work was sponsored by The Boeing Company.