AGRO is a novel Agile Ground RObot that combines the best attributes of both legged and wheeled platforms in its design to be highly maneuverable and rapidly deployable in emergency situations. The AGRO Mk I prototype has a 4-Wheeled Independent Drive and Steering (4WIDS) architecture that enables it to maneuver quasi-omnidirectionally on the ground.


This wheel architecture also allows AGRO to control its orientation in the air and land on its “feet” like a cat. Just as a cat twists its body and legs while conserving angular momentum to reorient itself, AGRO uses the reaction torques from its in-wheel hub motors to control its body orientation mid-air, land upright, and distribute the force of impact evenly to all four wheels. This is important because it allows AGRO to be rapidly and reliably deployed by emergency response personnel by being thrown over walls and fences, or through windows without the risk of landing upside-down or overloading its suspension. A news article about our initial results was published to IEEE Spectrum online here!
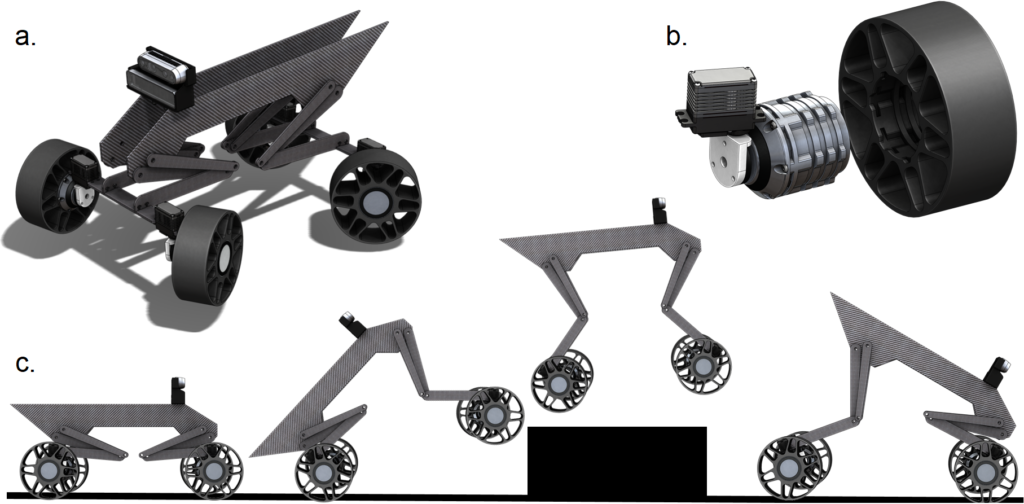
Future versions of (a.) AGRO will incorporate (b.) non-pneumatic tires to absorb landing impacts, context-dependent dynamic motion primitives to (c.) hop up stairs or onto curbs, and semiautonomous teleoperation control to prevent rollovers or crashes during high-speed maneuvering.
Publications:
-
- J. Kim, D. J. Gonzalez, and C. M. Korpela, “Comparing Feedback Linearization and Backstepping Control for Airborne Orientation of Agile Ground Robots using Wheel Reaction Torque”, IEEE 2021 American Control Conference (ACC 2021), New Orleans, LA, USA, May 2021.
- A. H. Rodriguez, D. J. Gonzalez, and M. C. Lesak, “Design of a Printed Circuit Board (PCB) for Electrical Integration on the Agile Ground Robot (AGRO),” IEEE MIT Undergraduate Research and Technology Conference (URTC 2020), Cambridge, Massachusetts, USA, October 2020.
- D. J. Gonzalez, M. C. Lesak, A. H. Rodriguez, J. A. Cymerman, and C. M. Korpela, “Dynamics and Aerial Attitude Control for Rapid Emergency Deployment of the Four-Wheel Independent Drive and Steering (4WIDS) Agile Ground Robot AGRO,” 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2020), Las Vegas, Nevada, USA, October 2020.