I am currently a Robotics Research Scientist at the Boston Dynamics AI Institute in Cambridge, MA. Prior to that I was a Robotics Research Engineer at Aurora Flight Sciences, and an ARL Postdoctoral Research Fellow in the Robotics Research Center at West Point directed by Colonel Christopher Korpela. I earned my Ph.D., S.M., and S.B. in Mechanical Engineering from MIT under Professor Harry Asada at the d’Arbeloff Laboratory.
My mission is to advance the Fundamentals of Robot Design, Dynamics, Control, and Motion Planning to create Robotic Human Augmentations and Athletic Robotic Teammates. I am currently working on new design concepts for human augmentation devices and hybrid wheel-leg robots inspired by athleticism expressed in nature, with planners, control architectures, and actuation technologies that operate in the space between centralized control, distributed feedback control, and mechanical impedance.
My approach is centered around solving human problems. I want to make robots robust, ubiquitous, and easier for people to use, especially for those working in extreme situations. I learn what their unsolved problems are, use a deterministic design process to identify key functional requirements, and work to design novel strategies, concepts, mechanisms, controllers, and algorithms to meet these requirements.
Current Research:
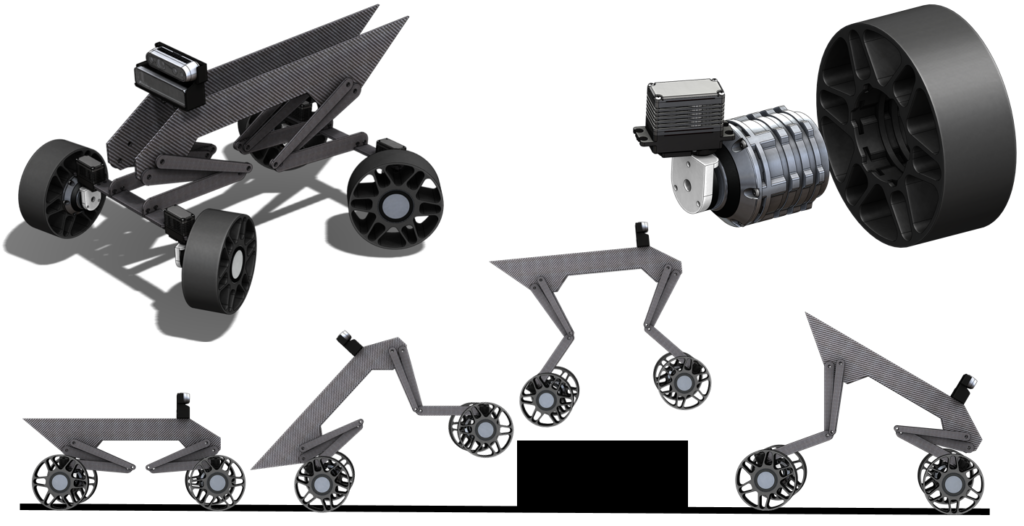
1. Design, Dynamics, Control, and Motion Planning for Hybrid Wheel-Leg Agile Ground Robot Teammates
I am exploring new designs and dynamic motions that can only be achieved at the intersection of wheeled vehicle design and legged robot design. The goal is to make semiautonomous teleoperable inspection robots easier and more intuitive to use. A news article about our initial results was published to IEEE Spectrum online here!
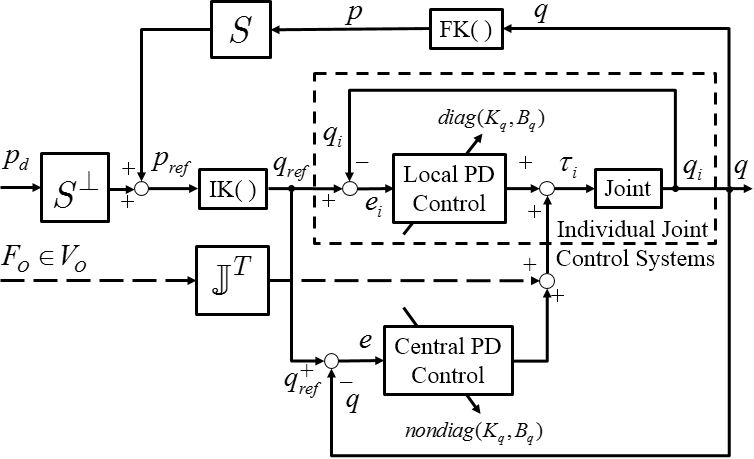
The Extra Robotic Legs (XRL) system is a wearable pair of articulated robot legs that allow DOE nuclear decommissioning workers to carry extra PPE and a cooling system while walking and crawling with ease. The XRL is a biped that must stand, balance, and walk on its own while maintaining safe physical interaction with the human operator. Safety is enabled by proprioceptive design, a failsafe distributed whole body control architecture, and naturally stable dynamics when walking with the user.

Contact Info:
Dr. Daniel J. Gonzalez
dgonzrobotics {at} gmail.com
Google Scholar Page
(Photo credit to Tony Pulsone in MechE at MIT)